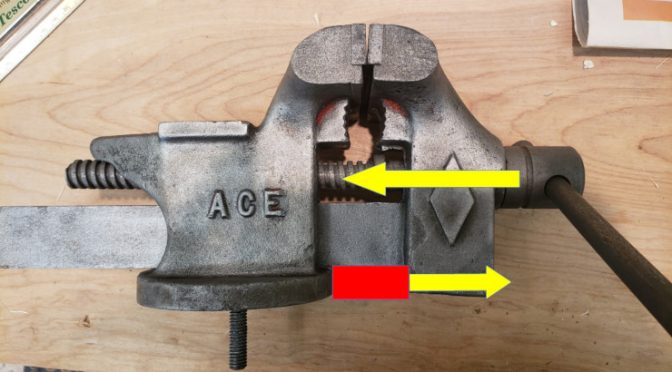
DON’T DO WHAT I DID! I didn’t realize the dangers until I was done.
A vise’s jaw faces are supposed to be parallel, that is: perfectly flat when they meet. As you can see, this vise’s jaws weren’t.
Continue reading I (Stupidly) Bend the Vise Faces Parallel →
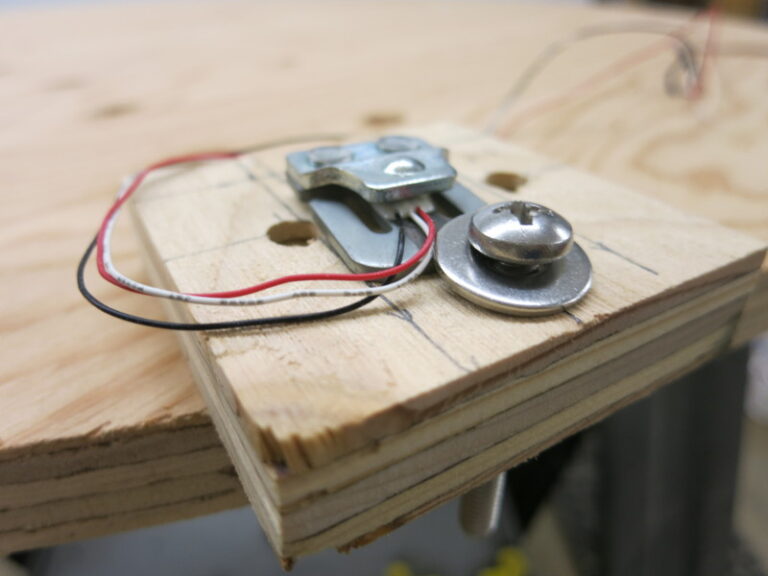
In my previous post I described how to calibrate a load sensor. This post shows how to measure center of gravity, and shows a failed attempt to mount the load sensors to the scale.
Now that I’m using 4 load cell amplifiers rather than 1, I can calibrate each load sensor separately. This in turn will let the Arduino calculate Pippa’s real weight accurately regardless of what part of her bed/scale she’s lying on.
Continue reading Dog Weight Scale Part 5: Center of Gravity and a Mounting Fail →

In an earlier post I tuned the chimes. In this post, I find one way not to make a frame for those chimes.
I created the frame for the glockenspiel, with a square frame on the outside so that I could mark the inner part of the frame with 1″ lines, one per chime.
Continue reading If At First You Don’t Succeed… →
Technical Writing and Self-Pubilshing
